论文撷英|《考虑轨迹规划和协同作业的路面无人压路机集群施工协作方法》
国际著名学术期刊《Computer-Aided Civil and Infrastructure Engineering》2024年9月刊发表了我院学者的论文《考虑轨迹规划和协同作业的路面无人压路机集群施工协作方法》(A cooperative methodology for multi-roller automation in pavement construction considering trajectory planning and collaborative operation)。吴荻非副研究员为第一作者,杜豫川教授为通讯作者,硕士研究生梁文耀、博士研究生田博远分列第三、五作者,论文的合作作者包括上海同陆云交通有限公司的钟盛工程师、36365线路检测中心no1李亦舜博士后和刘成龙副教授。

作者信息:Wu, D., Zhong, S.,Leong, M. I., Li, Y., Tian, B., Liu, C., & Du, Y.(2024). A cooperative methodology for multi-roller automation in pavement construction considering trajectory planning and collaborative operation.Computer-Aided Civil and Infrastructure Engineering, 1–19. https://doi.org/10.1111/mice.13347
文章摘要:智能压实及全自动化压实技术,已经成为路面施工领域的研究热点,可显著提高压实质量和效率。当多个压路机在同一区域内同时进行压实作业时,每个压路机的轨迹规划和协同控制成为确保高效和安全压实的关键因素。本文提出了无人压路机集群施工的整体协作架构,用于实现多压路机自动化应用中的安全和高效协同操作。首先提出了在役压路机的无人化改造技术,使其可通过跟踪控制算法自动跟随预设的轨迹。在此基础上,提出了一种面向无人驾驶压路机集群施工的轨迹规划方法,并构建了一系列协同控制策略,以确定执行压实任务时机和逻辑。此外,提出了一种用于无人驾驶压路机集群施工的“同进同退”协同控制策略,通过调控压路机的启停以避免碰撞。最后,通过在100米长、12米宽的现场试验区域测试并验证了所提出的轨迹规划方法和协同控制策略。这些测试包括单机试验、两机并排试验和多机协同测试。平均轨迹跟踪误差保持在15厘米以下,并证明了控制策略的有效性。
关键词:道路工程;协同控制策略;轨迹规划;无人压路机;智能压实
1. 研究贡献:
①本研究提出了一个完整的压路机集群自动化协同作业框架,通过对传统压路机进行自动化改造,实现了预设轨迹下的任务执行与多台压路机的同步控制。
②开发了适用于多台压路机施工的轨迹规划方法,确保压路机在工作区域内的高效压实作业。
③提出了“队列式”(PDC)、“交错式”(OEC)、“同进同退”(MFBT)等协同控制策略,避免碰撞的同时提升了施工安全性和操作效率。
④通过单压路机试验、两台压路机队列试验和“1+2+1”多压路机协作测试等实地测试,证明轨迹跟踪误差控制在15厘米以内,验证了所提出方法的有效性。
2. 研究背景:
传统路面施工中的铺设与压实过程,对路面质量起着关键作用。然而,传统方法依赖于大量人工和设备,常常面临精度控制不足、生产效率低下、成本高昂等问题,且人工操作误差容易导致压实不足,从而影响施工质量与效率。并且压实施工过程中需要确保均匀的滚压覆盖,以保证路面质量。
近年来,随着人工智能、无线通信、自动控制等技术的快速发展,交通基础设施建设领域逐渐被智能技术重塑。这些技术的应用,如智能压实技术和智能施工场地,通过传感器、通信和定位技术,实现了施工状态的实时数据采集与反馈控制,从而提高了施工质量和效率。此外,随着自动驾驶技术的发展,路面施工中的压路机自动化逐渐成为研究的热点。相较于乘用车自动驾驶,路面施工环境较为封闭且操作模式较为统一,因此更适合应用自动化技术。
然而,目前的研究大多集中在单台压路机的自动化操作上,针对实际施工中多台压路机协同作业的研究较为缺乏。如何通过有效的轨迹规划和协同控制,减少施工误差、避免碰撞,并提高整体施工效率,仍然是一个亟待解决的问题。因此,本文提出了一种针对多压路机的自动化协同控制方法,并通过实地测试来验证其在提高施工效率和安全性方面的有效性。
3. 研究内容:
(1) 提出了无人驾驶压路机自动循迹跟踪作业方法
首先,将传统的压路机改造为具有自动功能的压路机,这涉及到在压路机上安装传感器和控制器,使其能够根据外部指令或预设轨迹自动控制。随后提出了基于PID的轨迹跟踪控制算法,调整压路机的行进方向和速度,以减少轨迹跟踪误差。跟踪算法中解析了单钢轮和双钢轮路机的运动学模型,这些模型基于前、后框架通过旋转关节连接的两框架模型。跟踪控制计算时,考虑横向误差、航向误差和转向角误差,最终与PID控制算法构建了闭环反馈控制系统。
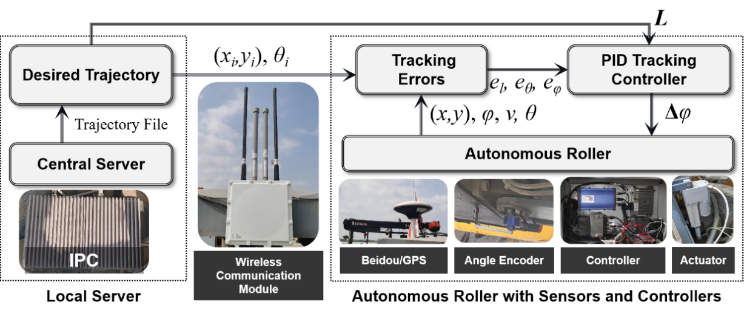
闭环反馈控制系统
(2) 提出了契合路面施工作业工艺的轨迹规划和计算方法
采用多工区划分方法,并将轨迹分为了直线操作、变道、区域进入/退出、区域切换等多类型轨迹模式,可结合施工要求进行组合。针对曲线轨迹计算,提出了基于三次贝塞尔曲线(Cubic Bezier Curve)的轨迹生成方法。通过控制点计算贝塞尔曲线的轨迹点,确保压路机能够按照预定路径行驶。轨迹点之间的间距设置为20厘米(直线轨迹)和5厘米(曲线轨迹),以保证跟踪精度。同时,面向多车通讯要求,定义了轨迹文件的命令格式,包含每个轨迹点的详细信息,如工作区ID、压路机ID、轨迹点ID、预期时间、经纬度、速度等。通过LTE网络将轨迹文件传输到压路机的终端,压路机解析这些文件并执行压实任务,跟踪预设的轨迹点。
(3) 提出了无人驾驶压路机集群作业的协同控制策略
为了确保压实质量和效率,需要在压路机之间均匀分配任务,控制压路机的转向半径,并减少在直线压实轨迹上的启动和停止,以避免由于异常驾驶造成的推动、隆起和不均匀问题。本研究提出了提出了两种不同的控制模式,即“编队队驾驶”压实(PDC)模式和“逐一进入”压实(OEC)模式,以及 “同进同退”(MFBT)的自适应控制策略。其中MFBT控制策略是一种实时控制方法,适用于所有参与的压路机。通过控制压路机的启动和停止,确保所有压路机尽可能朝相同方向移动,从而避免纵向碰撞。MFBT策略包括以下几个步骤。基于上述控制策略,分别通过仿真分析和现场测试对控制效率和有效性进行测试和验证。

两类典型的作业控制模式
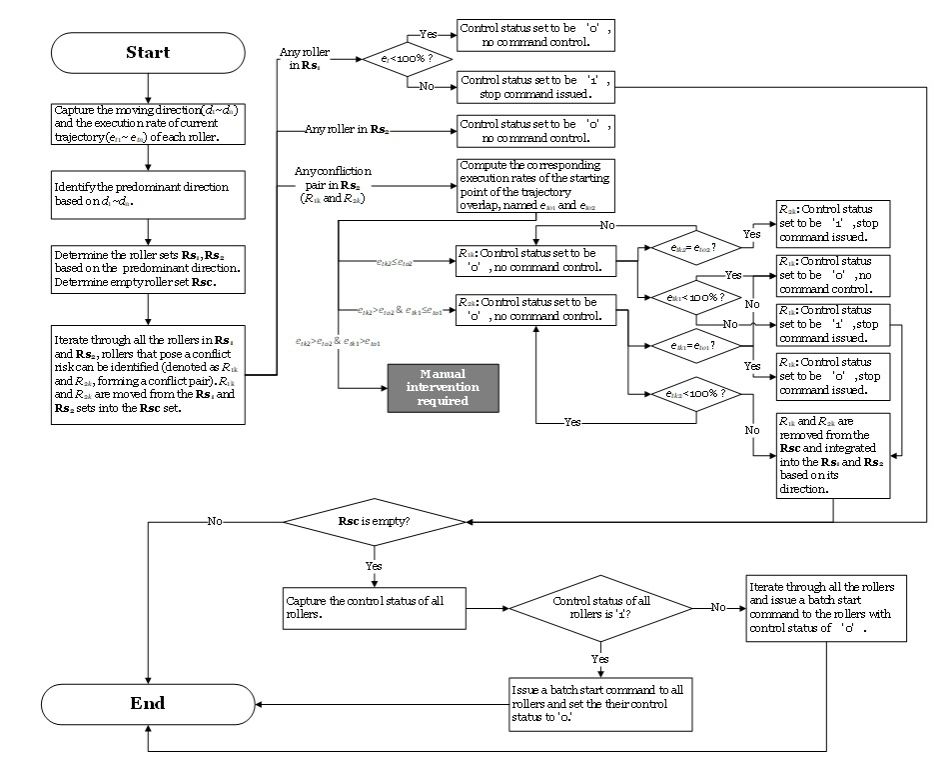
“同进同退”协同控制策略
4. 测试验证及结论:
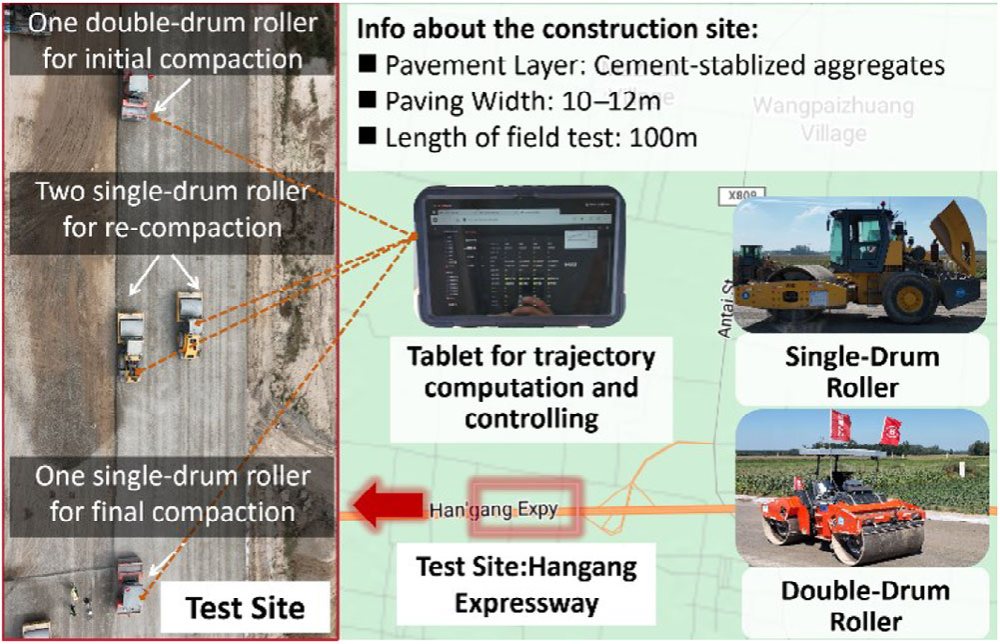
实地测验在河北省的一段新建高速公路上进行。该区域主要是直路,宽度在11至12米之间。为了确保实验不会影响道路施工质量,测验在水泥稳定碎石基层进行。使用四台改装后的自动压路机参与测试,包括两台单钢轮压路机和两台双钢轮压路机。测验还使用LTE网络和RTK定位系统来保证厘米级的定位精度,并通过一个网页端的终端控制平台对压路机集群进行协同操作管理。
实验设置了三个主要测试场景:1)单压路机测试:用于验证每台压路机的轨迹跟踪性能。2)双压路机队列测试:验证压路机在换道和工作区切换时的操作一致性。3)“1+2+1”模式协同操作测试:验证提出的协同控制策略的有效性。
(1)单压路机测试(Test 1: Single-roller test):
在单压路机测试中,分别对单钢轮压路机和双钢轮压路机的轨迹跟踪性能进行了评估。结果表明,单滚筒压路机的平均误差为6.3厘米,双滚筒压路机的平均误差为14.3厘米。然而,较大的轨迹误差往往发生在工作区转换时,尤其是在接近工作区边缘转弯时,最大误差达到60厘米以上。为了保证施工安全,设定了40厘米的最大允许误差,当超过此误差时,系统会触发自动停止命令。
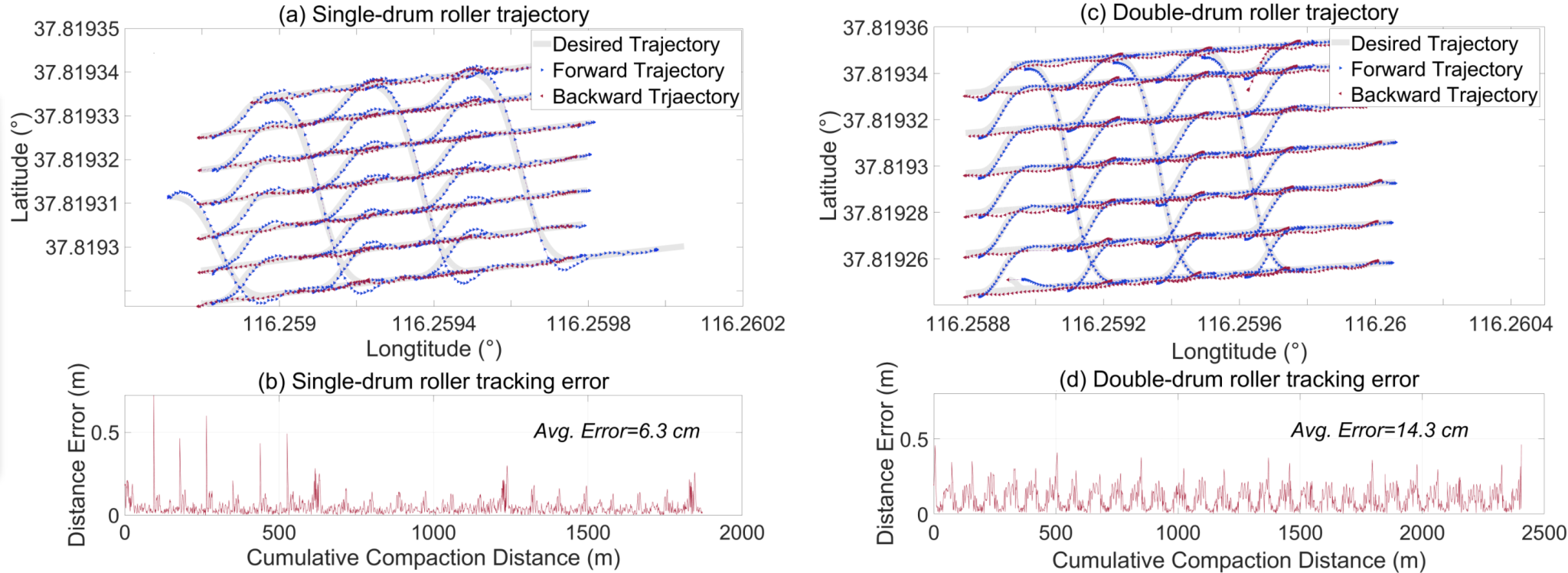
单机(双钢轮、单钢轮)测试效果
(2)双压路机队列测试(Test 2: Two-roller-in-a-row test):
在双压路机队列测试中,验证了压路机操作的一致性。结果显示,两台压路机的轨迹跟踪误差控制良好,且压路机的距离-时间曲线在直线压实施工、换道和工区切换中均匹配良好。通过终端控制平台的“一键控制”功能,两台压路机的启动和停止动作实现了高度同步,表现出良好的操作一致性。
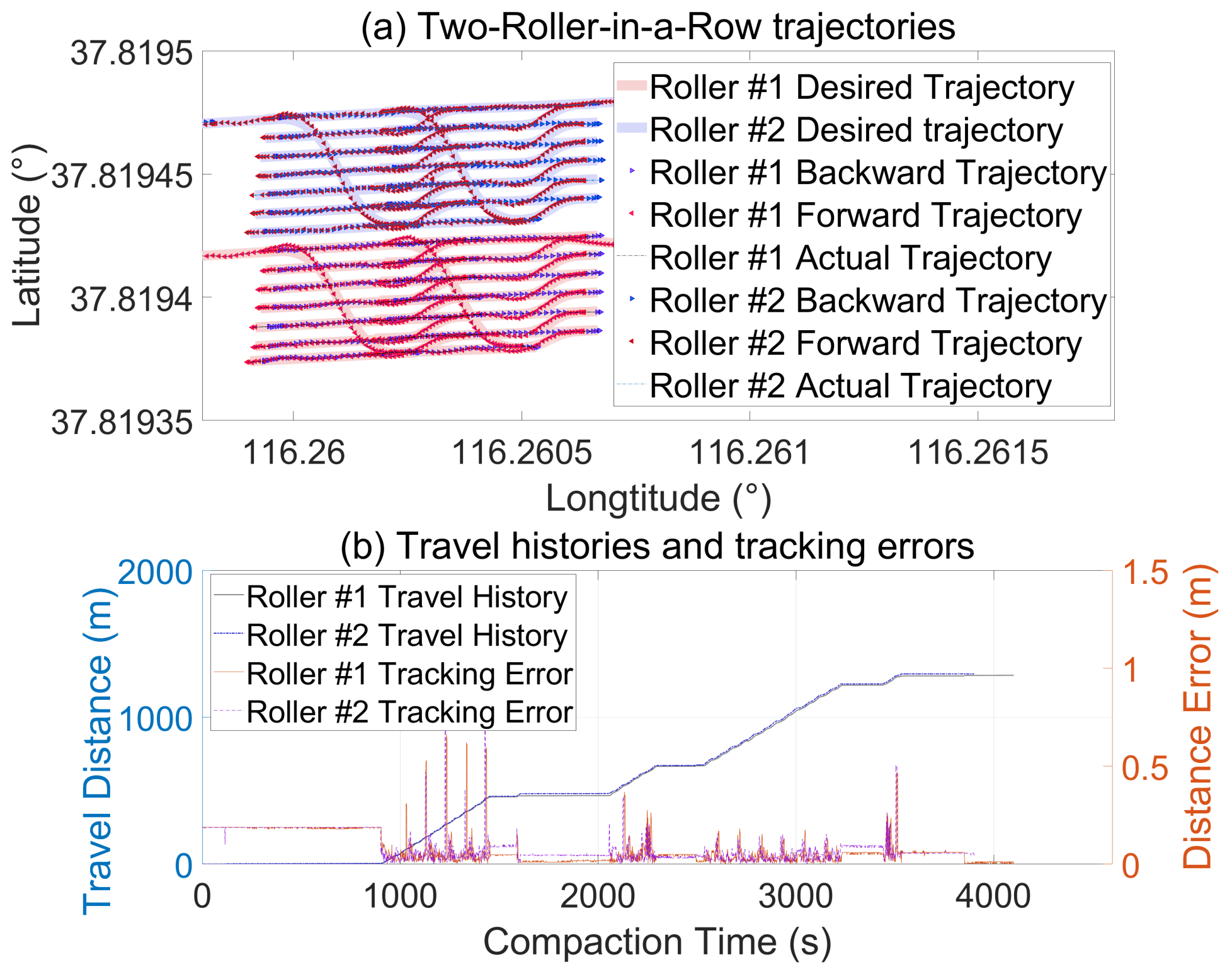
双机并排测试效果
(3)“1+2+1”模式测试(Test 3:“1+2+1”mode):
在多压路机协同控制测试中,采用了“1+2+1”模式,分别是1台用于初步压实的双钢轮压路机、2台用于复压的单钢轮压路机以及1台用于终压的双钢轮压路机,四台压路机在同一区域内进行协同操作。测试结果表明,所有压路机的跟踪误差平均在2.14厘米到6.18厘米之间,显示出较好的轨迹跟踪精度。并且通过“同进同退”策略(MFBT)使得多台压路机在执行直线压实、转弯和换道时的同步性较好,避免了压路机间的碰撞风险。同时,测试生成的压实轮廓图表明,压路机集群自动化协同作业可以实现均匀的压实分布,压实质量得到了有效保证,且通过自动化控制大大提高了施工效率。
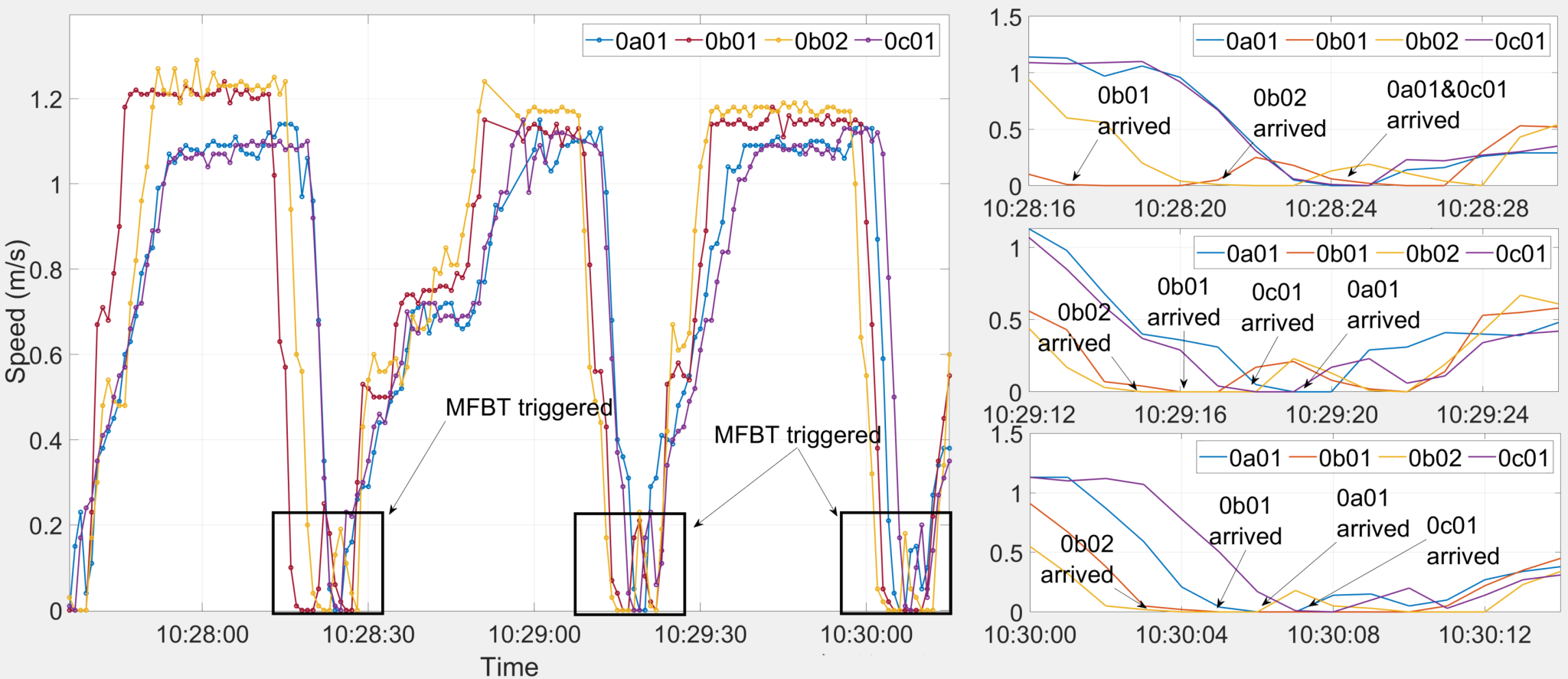
多机“同进同退”协同控制策略执行效果